Презентация - Конструирование шагающего робота
Нужно больше вариантов? Смотреть похожие Нажмите для полного просмотра 
|
Распечатать
- Уникальность: 95%
- Слайдов: 49
- Просмотров: 5573
- Скачиваний: 2430
- Размер: 12.28 MB
- Онлайн: Да
- Формат: ppt / pptx
Примеры похожих презентаций
 Лего конструирование на уроке и внеурочной деятельности младших школьников в условиях ФГОС 2-го поколения
Лего конструирование на уроке и внеурочной деятельности младших школьников в условиях ФГОС 2-го поколения Перспективы развития роботов
Перспективы развития роботов Техническое конструирование и моделирование
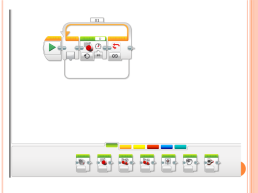
Техническое конструирование и моделирование Составление программ для «Робота»
Составление программ для «Робота» Робот. Конструкция ветвление
Робот. Конструкция ветвление Методика конструирования урока-исследования
Методика конструирования урока-исследования Робототехника в современном образовании
Робототехника в современном образовании
Слайд 1
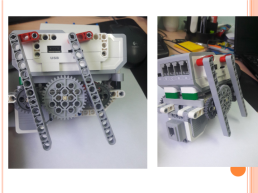
Конструирование шагающего робота
Разработчик: Каримова Алия Радиковна, методист МБОУ ДОД Дом детского творчества с. Стерлибашево
Разработчик: Каримова Алия Радиковна, методист МБОУ ДОД Дом детского творчества с. Стерлибашево
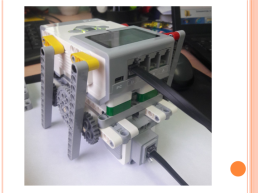
Слайд 2

Микрокомпьютер EV3
Слайд 3

Зарядное устройство
Слайд 4

Порты ввода 1, 2, 3 и 4
для подключения датчиков к модулю EV3.
Слайд 5

Порты вывода
A, B, C и D для подключения
моторов к модулю EV3.
Порт PC используется для подключения модуля EV3 к компьютеру.
Порт PC используется для подключения модуля EV3 к компьютеру.
Слайд 6

Все звуки модуля EV3 воспроизводятся через динамик.
Слайд 7

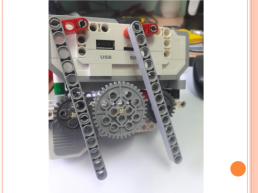
USB-порт можно использовать для установки адаптера Wi-Fi для подключения к беспроводной сети
Порт SD-карты увеличивает доступную память блока EV3 за счет SD-карты (максимум 32 ГБ)
Порт SD-карты увеличивает доступную память блока EV3 за счет SD-карты (максимум 32 ГБ)
Слайд 8

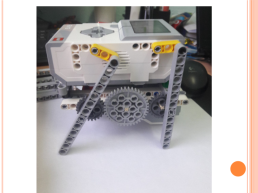
Средний мотор
Большой мотор
Большой мотор
Слайд 9

Датчик касания
Датчик расстояния
Датчик цвета
Датчик расстояния
Датчик цвета
Слайд 10

Ступица
Шина
Шина
Слайд 11

Зубчатое колесо
Слайд 12

Втулка
Фиксатор
Фиксатор
Слайд 13
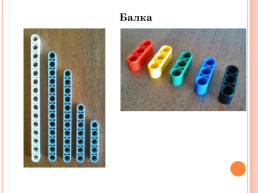
Балка
Слайд 14

Балка изогнутая
Слайд 15

Соединительный штифт
Слайд 16
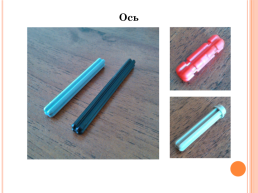
Ось
Слайд 17

Существуют 2 вида класса роботов:
Мобильные
Манипуляционные
Мобильные
Манипуляционные
Слайд 18
Слайд 19

Слайд 20

Слайд 21

Слайд 22

Слайд 23
Слайд 24
Слайд 25

Слайд 26
Слайд 27

Слайд 28

Слайд 29

Слайд 30

Слайд 31

Слайд 32

Слайд 33

Слайд 34

Слайд 35

Слайд 36

Слайд 37

Слайд 38
Слайд 39
Слайд 40

Слайд 41

Слайд 42
Слайд 43
Слайд 44
Слайд 45
Слайд 46
Слайд 47

Слайд 48

Слайд 49
^ Наверх
X
Благодарим за оценку!
Мы будем признательны, если Вы так же поделитесь этой презентацией со своими друзьями и подписчиками.