Презентация - Занятие 5 управление сервоприводом
Нужно больше вариантов? Смотреть похожие Нажмите для полного просмотра 
|
Распечатать
- Уникальность: 91%
- Слайдов: 11
- Просмотров: 1431
- Скачиваний: 61
- Размер: 1.18 MB
- Онлайн: Да
- Формат: ppt / pptx
Примеры похожих презентаций
 Занятие на развитие памяти, внимания, мышления
Занятие на развитие памяти, внимания, мышления Местное самоуправление в зарубежных странах
Местное самоуправление в зарубежных странах Комплексная система управления «умный дом»
Комплексная система управления «умный дом» Использование материала по страноведению на занятиях по английскому языку как средство приобщения учащихся к иноязычной культуре
Использование материала по страноведению на занятиях по английскому языку как средство приобщения учащихся к иноязычной культуре Структурные элементы основ местного самоуправления
Структурные элементы основ местного самоуправления Управление качеством
Управление качеством Управление развитием школы
Управление развитием школы
Слайд 1

Занятие 5 Управление сервоприводом
Слайд 2

Сервопривод
Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения.
Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения.
Слайд 3
Сервопривод
Сервоприводом является любой тип механического привода, имеющий в составе датчик и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике согласно заданному внешнему значению. Проще говоря, сервопривод – это мотор, положением вала которого можно управлять, задавая угол поворота. Для сервопривода, потребляющего большой ток, необходим свой источник питания.
Сервоприводом является любой тип механического привода, имеющий в составе датчик и блок управления приводом, автоматически поддерживающий необходимые параметры на датчике согласно заданному внешнему значению. Проще говоря, сервопривод – это мотор, положением вала которого можно управлять, задавая угол поворота. Для сервопривода, потребляющего большой ток, необходим свой источник питания.
Слайд 4
Функции библиотеки Servo
Стандартная библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого вводится переменная типа Servo. Управление осуществляется следующими функциями: attach – присоединяет переменную к конкретному пину. Возможны 2 варианта для функции: servo.attach(pin) и servo.attach(pin, min,max). При этом pin – это номер пина, к которому присоединяется сервопривод, min и max – длины импульсов в микросекундах, отвечающих за углы поворота от 0 до 180.
Стандартная библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого вводится переменная типа Servo. Управление осуществляется следующими функциями: attach – присоединяет переменную к конкретному пину. Возможны 2 варианта для функции: servo.attach(pin) и servo.attach(pin, min,max). При этом pin – это номер пина, к которому присоединяется сервопривод, min и max – длины импульсов в микросекундах, отвечающих за углы поворота от 0 до 180.
Слайд 5
Функции библиотеки Servo
write – отдает команду сервоприводу принять некоторое значение параметров. Синтаксис: servo.write(angle), где angle – угол, на который должен повернуться сервопривод writeMicroseconds – отдает команду на сервопривод импульс определенной длины и является низкоуровневым аналогом предыдущей команды. Синтаксис: servo.writeMicrosecunds(ms), где ms – длина импульса в микросекундах.
write – отдает команду сервоприводу принять некоторое значение параметров. Синтаксис: servo.write(angle), где angle – угол, на который должен повернуться сервопривод writeMicroseconds – отдает команду на сервопривод импульс определенной длины и является низкоуровневым аналогом предыдущей команды. Синтаксис: servo.writeMicrosecunds(ms), где ms – длина импульса в микросекундах.
Слайд 6
Функции библиотеки Servo
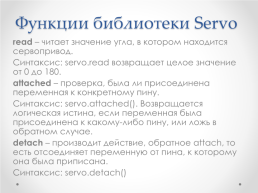
read – читает значение угла, в котором находится сервопривод. Синтаксис: servo.read возвращает целое значение от 0 до 180. attached – проверка, была ли присоединена переменная к конкретному пину. Синтаксис: servo.attached(). Возвращается логическая истина, если переменная была присоединена к какому-либо пину, или ложь в обратном случае. detach – производит действие, обратное attach, то есть отсоединяет переменную от пина, к которому она была приписана. Синтаксис: servo.detach()
read – читает значение угла, в котором находится сервопривод. Синтаксис: servo.read возвращает целое значение от 0 до 180. attached – проверка, была ли присоединена переменная к конкретному пину. Синтаксис: servo.attached(). Возвращается логическая истина, если переменная была присоединена к какому-либо пину, или ложь в обратном случае. detach – производит действие, обратное attach, то есть отсоединяет переменную от пина, к которому она была приписана. Синтаксис: servo.detach()
Слайд 7
Задача 1
Подключить сервопривод и с дискретностью 2,5 секунды заставить его принимать крайние положения. Реализовать два скетча и объяснить разницу. Для эксперимента нам понадобятся: платформа Arduino сервопривод соединительные провода USB-кабель
Подключить сервопривод и с дискретностью 2,5 секунды заставить его принимать крайние положения. Реализовать два скетча и объяснить разницу. Для эксперимента нам понадобятся: платформа Arduino сервопривод соединительные провода USB-кабель
Слайд 8
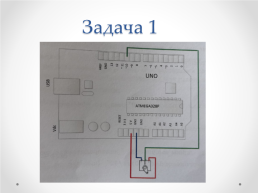
Задача 1
Слайд 9
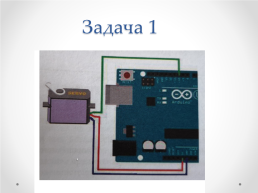
Задача 1
Слайд 10
Задача 2
Необходимо поворачивать сервопривод из одного крайнего положения в другое по показаниям ИК-датчика. При нахождении сервопривода в крайних положениях должны загораться светодиоды и издаваться звук разной частоты. Для эксперимента нам понадобятся: платформа Arduino USB-кабель ИК-датчик сервопривод два светодиода два резистора 220 Ом соединительные провода макетная плата
Необходимо поворачивать сервопривод из одного крайнего положения в другое по показаниям ИК-датчика. При нахождении сервопривода в крайних положениях должны загораться светодиоды и издаваться звук разной частоты. Для эксперимента нам понадобятся: платформа Arduino USB-кабель ИК-датчик сервопривод два светодиода два резистора 220 Ом соединительные провода макетная плата
Слайд 11
Задача 3
Повторить предыдущую задачу, заменив ИК-датчик на звуковой сонар. Расстояние до препятствия сопровождать короткими импульсами длительностью 0,8 с, дискретностью 0,5 с. «Расстояние» между серией импульсов – 2 с. Для эксперимента нам понадобятся: платформа Arduino USB-кабель ультразвуковой сонар сервопривод два светодиода два резистора 220 Ом соединительные провода макетная плата
Повторить предыдущую задачу, заменив ИК-датчик на звуковой сонар. Расстояние до препятствия сопровождать короткими импульсами длительностью 0,8 с, дискретностью 0,5 с. «Расстояние» между серией импульсов – 2 с. Для эксперимента нам понадобятся: платформа Arduino USB-кабель ультразвуковой сонар сервопривод два светодиода два резистора 220 Ом соединительные провода макетная плата
^ Наверх
X
Благодарим за оценку!
Мы будем признательны, если Вы так же поделитесь этой презентацией со своими друзьями и подписчиками.